


Torseur d'une action mécanique transmissible
Nous venons de mettre en évidence le fait que deux vecteurs sont nécessaires pour modéliser convenablement une action mécanique s'exerçant sur un système matériel. En effet, selon le point où l'on se place pour ressentir les effets d'une action mécanique, un vecteur force et/ou un vecteur moment sont nécessaires.
Définition
Fondamental :
Le vecteur force et le vecteur moment en un point sont regroupés dans un torseur appelé torseur des actions mécaniques transmissibles :
Ce torseur représente l'action mécanique de 2 (solide, liquide, gaz) sur un solide 1 :
 : Résultante du torseur, vecteur indépendant du point où le torseur est exprimé (invariant vectoriel).
: Résultante du torseur, vecteur indépendant du point où le torseur est exprimé (invariant vectoriel).  : Moment du torseur, ce vecteur dépend du point d'expression du torseur.
: Moment du torseur, ce vecteur dépend du point d'expression du torseur.
Comme en cinématique, on peut utiliser les notations en ligne ou en colonne des torseurs faisant intervenir les composantes de chaque vecteur :

Propriétés
Changement de point d'un torseur d'action mécanique
Connaissant le modèle de l'action mécanique de 2 sur 1 en un point A :
il est possible de donner le modèle de cette action en un point B en utilisant la formule de changement de point du torseur :

Somme de deux torseurs
Le torseur représentant l'action de deux solides 2 et 3 sur un solide 1 peut s'écrire :
Attention :
Pour pouvoir additionner les composantes de deux torseurs, ceux-ci doivent être réduits en un même point.
Torseurs particuliers
Torseur à résultante : glisseur
Fondamental :
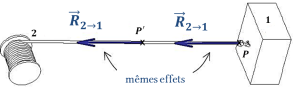
Un torseur est un glisseur s'il existe un point P où le moment est nul.

Remarque :
Un glisseur est utilisé pour modéliser une force. Ses éléments de réduction restent identiques en tout point du support de cette force, soit en tout point de la droite
|  |

Preuve :

Torseur couple
Fondamental :
Un couple est un torseur dont la résultante est nulle.

Exemple : Couple de forces
Soient deux actions mécaniques exercées par chacune des mains d'un utilisateur aux extrémités d'une clé, modélisables par deux glisseurs en B et en C :
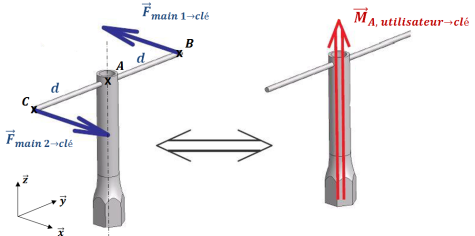

Dans le cas où les deux forces
 et
et
 ont même direction, même norme et sont de sens opposés on parle de couple de forces :
ont même direction, même norme et sont de sens opposés on parle de couple de forces :
Et donc la résultante des actions mécaniques exercées par l'utilisateur sur la clé est nulle :
De plus, les moments au point A de chacune de ces forces sont identiques :
Donc le moment résultant des actions mécaniques exercées par l'utilisateur sur la clé correspondant à la somme des moments exercés par chacune des mains sur la clé s'écrit :
On peut ainsi donner le torseur résultant de l'action mécanique de l'utilisateur sur la clé :

Remarque :
Un torseur couple a les mêmes éléments de réduction en tout point de l'espace.
Preuve :




