Liaisons équivalentes
Comme celà a déjà été fait en modélisation cinématique, il est possible de déterminer la liaison équivalente à une association de liaisons en série ou en parallèle.
La méthode jusqu'alors utilisée faisait appel aux torseur cinématiques des liaisons. Il s'agissait de la méthode cinématique.
La méthode présentée ci-dessous fait appel aux torseurs des actions mécaniques transmissibles par les liaisons. On parle alors de méthode statique.
Association de liaisons en série
Fondamental :

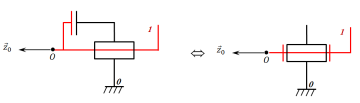
La liaison équivalente entre 2 et 0 doit être capable de transmettre toutes les composantes d'efforts qui sont transmises par
 et
et
 :
:
Rappel (méthode cinématique) : la liaison équivalente entre 0 et 2 se détermine par composition des torseurs cinématiques :
Exemple : pompe à pistons axiaux

On cherche le torseur :
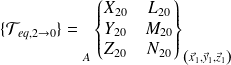
On doit avoir :

Liaison sphère plan de centre A et de normale
| 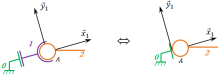 |


Association de liaisons en parallèle
Fondamental :
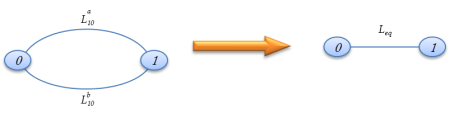
La liaison équivalente doit pouvoir transmettre tous les efforts que transmettent chacune des liaisons simples :
Rappel (méthode cinématique) : la liaison équivalente entre 1 et 0 se détermine en égalisant les torseurs cinématiques :

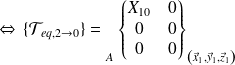
Exemple : micromoteur de modélisme

Pour déterminer la liaison équivalente, on se sert de la relation :