Cas général
Dans un système, les solides exercent des actions mécaniques sur les autres solides avec qui ils sont en contact : ils transmettent des actions mécaniques par l'intermédiaire des liaisons.
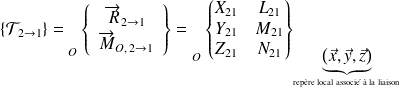
Dans le cas général, le torseur des actions mécaniques transmissibles par un solide 2 sur un solide 1 par l'intermédiaire d'une liaison est noté :
En l'absence de frottements entre les surfaces en contact, certaines de ces composantes ne sont pas transmises de 2 à 1 : soit on peut transmettre un effort dans une direction, soit le mouvement est possible.
Exemple : Liaison glissière entre 1 et 2.
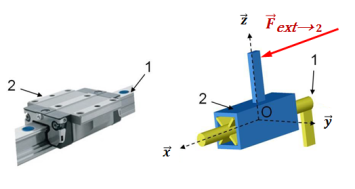
Si on applique une force
 (selon
(selon
 ) sur le solide 2, celui-ci se déplace selon
et l'effort n'est pas transmis au solide 1. Dans toutes les autres directions, l'effort ou le moment aurait été transmis. Autrement dit, le solide 2 ne peut pas transmettre d'effort à 1 selon
c'est à dire dans une direction où la mobilité est permise.
) sur le solide 2, celui-ci se déplace selon
et l'effort n'est pas transmis au solide 1. Dans toutes les autres directions, l'effort ou le moment aurait été transmis. Autrement dit, le solide 2 ne peut pas transmettre d'effort à 1 selon
c'est à dire dans une direction où la mobilité est permise.
Le torseur d'action mécanique transmissible par une liaison glissière de direction
s'écrit alors, dans le repère local de la liaison :
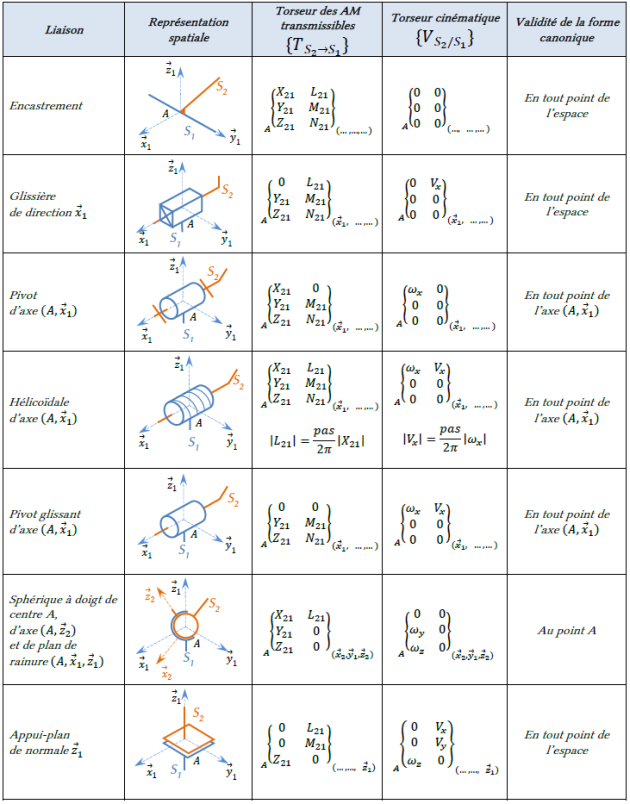
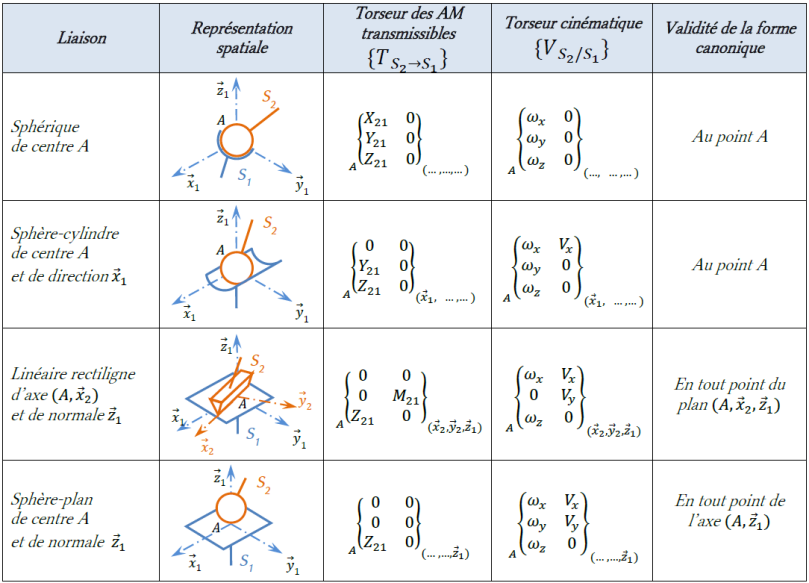
Le tableau suivant reprend toutes les liaisons décrites dans le chapitre de cinématique : le torseur d'action mécanique transmissible est précisé ainsi que le torseur cinématique.